Products: Abaqus/Explicit Abaqus/CAE
Contact controls for Abaqus/Explicit contact pairs can be used
to scale the stiffness used by penalty contact constraints, and
to adjust the search algorithms that track the motions between two surfaces.
If you use the penalty method to enforce contact constraints in a contact pair (see “Contact constraint enforcement methods in Abaqus/Explicit,” Section 37.2.3), Abaqus/Explicit resists penetrations between surfaces by applying a “spring” stiffness to penetrating nodes. The “spring” stiffness that relates the contact force to the penetration distance is chosen automatically by Abaqus/Explicit, such that the effect on the time increment is minimal yet the allowed penetration is not significant in most analyses. Significant penetrations may develop in an analysis if any of the following factors are present:
Displacement-controlled loading
Materials at the contact interface that are purely elastic or stiffen with deformation
Deformable elements (especially membrane and surface elements) that have relatively little mass of their own and are constrained via methods other than boundary conditions (for example, connectors) involved in contact
Rigid bodies that have relatively little mass or rotary inertia of their own and are constrained via methods other than boundary conditions (for example, connectors) involved in contact
You can specify a scale factor by which to modify penalty stiffnesses for specified contact pairs. This scaling may affect the automatic time incrementation. Use of a large scale factor is likely to increase the computational time required for an analysis because of the reduction in the time increment that is necessary to maintain numerical stability (see “Contact constraint enforcement methods in Abaqus/Explicit,” Section 37.2.3, for further discussion).
| Input File Usage: | Use both of the following options to scale the default penalty stiffnesses: |
*CONTACT PAIR, MECHANICAL CONSTRAINT=PENALTY, CPSET=contact_pair_set_name surface_1, surface_2 *CONTACT CONTROLS, CPSET=contact_pair_set_name, SCALE PENALTY=factor |
| Abaqus/CAE Usage: | Interaction module: Create Contact Controls: Name: contact_controls_name, Abaqus/Explicit contact controls: Penalty stiffness scaling factor: factor |
Interaction editor: Mechanical constraint formulation: Penalty contact method, Contact controls: contact_controls_name |
In a finite-sliding contact pair, searches are conducted continually throughout an analysis to track the relative motion between the two contacting surfaces. The contact tracking algorithm consists of an expensive, periodic global search and a less expensive, regular local search; the search algorithms are discussed in detail in “Contact tracking algorithms” in “Contact formulations for contact pairs in Abaqus/Explicit,” Section 37.2.2. You can use contact controls to adjust the frequency and cost of these searches.
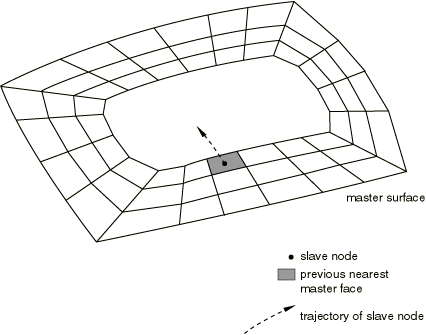
By default for two-surface contact pairs, Abaqus/Explicit performs a more thorough search of the master faces near each slave node every one hundred increments, which is sufficient for most analyses. However, there are some valid contact situations where a global search needs to be used more or less often during the step. Figure 35.5.5–1 illustrates a situation that might require more frequent global tracking. The master surface is a valid surface, but it contains a hole. The slave node shown identifies the shaded element facet as the closest master surface facet during an increment. The local contact search looks at this master surface facet and its neighbors.
If the slave node displaces across the hole in relatively few increments, the potential contact between the slave node and the master surface facets across the hole will not be detected because the local contact search will still be checking the shaded facet. This same situation can occur when a slave node moves rapidly across a deep valley in the master surface. The solution to this problem is to conduct global contact searches more frequently. You can specify the number of increments between global searches, n, for a given contact pair, if a value other than the default of 100 is desired.
| Input File Usage: | Use both of the following options: |
*CONTACT PAIR, CPSET=contact_pair_set_name *CONTACT CONTROLS, CPSET=contact_pair_set_name, GLOBTRKINC=n |
| Abaqus/CAE Usage: | Interaction module: Create Contact Controls: Name: contact_controls_name, Abaqus/Explicit contact controls: Specify max number of increments: n |
Interaction editor: Contact controls: contact_controls_name |
The default local contact search used by Abaqus/Explicit uses techniques that allow it to use a minimum amount of computational time. If the local contact search has difficulty enforcing the appropriate contact conditions, a more conservative local contact search may resolve the problem. The contact search specified has no effect on contact pairs using self-contact.
| Input File Usage: | Use both of the following options: |
*CONTACT PAIR, CPSET=contact_pair_set_name *CONTACT CONTROLS, CPSET=contact_pair_set_name, FASTLOCALTRK=NO |
| Abaqus/CAE Usage: | Interaction module:
Create Contact Controls: Name: contact_controls_name,
Abaqus/Explicit contact controls: toggle off Fast local tracking |
Calculating the correct contact conditions along a surface that is highly warped is very difficult, especially when the relative velocity of the contacting surfaces is very large. By default, Abaqus/Explicit monitors the orientation of every deformable master surface formed by element faces every 20 increments to check that the surface is not highly warped; rigid faceted surfaces are checked for large warping only at the beginning of a step. If a surface becomes highly warped, a warning message is issued in the status (.sta) file (see “Contact diagnostics in an Abaqus/Explicit analysis,” Section 38.2.1), and a more accurate algorithm is used to calculate each slave node's nearest point on the warped master surface. The alternate algorithm provides a more accurate solution but uses slightly more computational time.
By default, Abaqus/Explicit considers a surface to be highly warped when the angle between surface normals at the nodes of a facet varies by more than 20°. The maximum variation of the surface normal over a facet is called the out-of-plane warping angle. You can change the default value of the out-of-plane warping angle cutoff from step to step for any contact pair in the model.
| Input File Usage: | *CONTACT CONTROLS, CPSET=contact_pair_set_name, WARP CUT OFF=angle |
| Abaqus/CAE Usage: | Interaction module: |
Create Contact Controls: Name: contact_controls_name, Abaqus/Explicit contact controls: Angle criteria for highly warped facet (degrees): angle Interaction editor: Contact controls: contact_controls_name |
You can specify the frequency, in increments, at which Abaqus/Explicit checks for warped surfaces for any contact pair in the model. The frequency can be changed from step to step. Checking for warped surfaces more frequently (the default is every 20 increments) will cause a slight increase in computational time for the analysis.
| Input File Usage: | *CONTACT CONTROLS, CPSET=contact_pair_set_name, WARP CHECK PERIOD=n |
| Abaqus/CAE Usage: | Interaction module: |
Create Contact Controls: Name: contact_controls_name, Abaqus/Explicit contact controls: Warp check increment: n Interaction editor: Contact controls: contact_controls_name |